Lecture 14
E12 Linear Physical Systems Analysis
March 5, 2026
Examples of second-order systems with damping
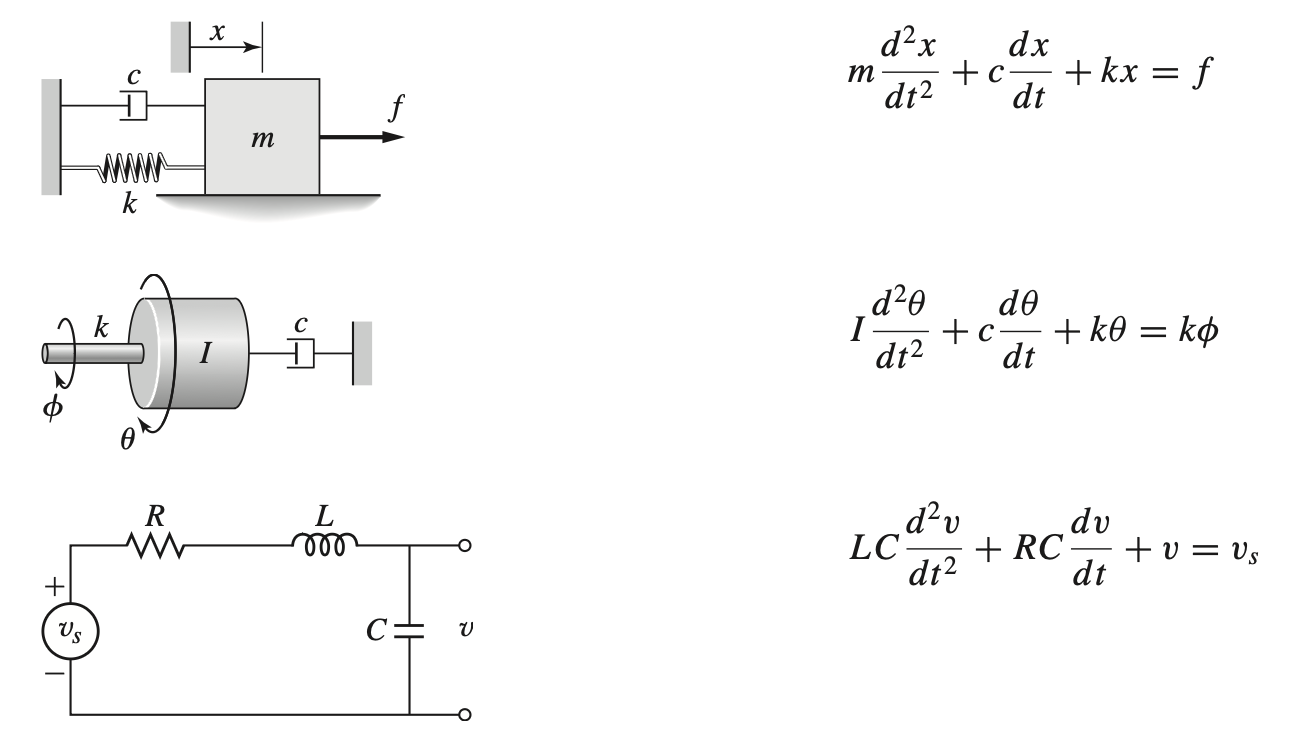
Second-order systems with damping
The second-order differential equation \[\ddot{x} + a \dot{x} + b x = 0\] usually has the solution \(x(t) =e^{s t}\) where \(s\) satisfies the characteristic equation \[s^2 + a s + b = 0 \implies s_{1,2} = \frac{-a \pm \sqrt{a^2-4b}}{2}\]
Case 1 when \(a^2 - 4b > 0\) and therefore \(s_{1,2} \in \mathbb{R}\)
\[x(t) = K_1 e^{s_1 t} + K_2 e^{s_2 t} \qquad K_1,K_2 \in \mathbb{R}\]
| Case 1a: \(s_1,s_2 < 0\) | Case 1b: \(s_1< 0<s_2\) | Case 1c: \(s_1, s_2 > 0\) |
|---|---|---|
| Both roots negative | One positive, one negative | Both roots positive |
 |
 |
 |
 |
 |
 |
Case 2 when \(a^2 - 4b < 0\) and therefore \(s_{1,2} \in \mathbb{C}\)
\[ \begin{aligned} x(t) &= P e^{s_1 t} + \overline{P} e^{s_2 t} \qquad P \in \mathbb{C} \\ &= e^{rt} \left( A \cos \omega t + B \cos \omega t \right) \qquad A,B \in \mathbb{R} \\ s_{1,2} &= r \pm i \omega \end{aligned} \]
| Case 2a: \(r < 0\) | Case 2b: \(r = 0\) | Case 2c: \(r > 0\) |
|---|---|---|
| Real part negative | Real part zero | Real part positive |
 |
 |
 |
 |
 |
 |
Case 3 when \(a^2 - 4b = 0\) and therefore \(s_1 = s_2\)
\[ x(t) = (C_1 + C_2t) e^{rt} \]
| Case 3a: \(r < 0\) | Case 3b: \(r = 0\) |
|---|---|
| Nonzero repeated roots | Repeated roots at zero |
 |
 |
 |
 |
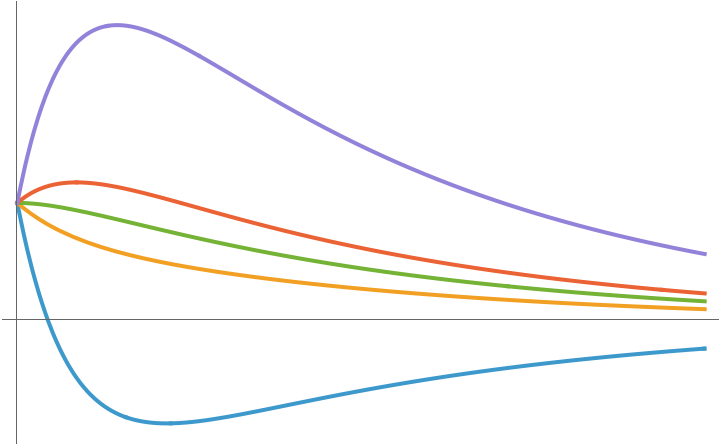
Changing the damping
Let’s examine solutions to \[m \ddot{x} + b \dot{x} + k x = 0, \qquad x(0) = 1, \dot{x}(0) = 0\] With \(k=2\), \(m=3\), and \(b\) allowed to vary from \(0\) to \(6\).
| Value of \(b\) | Motion |
|---|---|
| \(0.0\) |  |
| \(0.5\) |  |
| \(1.0\) |  |
| \(1.5\) |  |
| \(2.0\) |  |
| \(2.5\) |  |
| \(3.0\) |  |
| \(3.5\) |  |
| \(4.0\) |  |
| \(4.5\) |  |
| \(5.0\) |  |
| \(5.5\) |  |
| \(6.0\) |  |
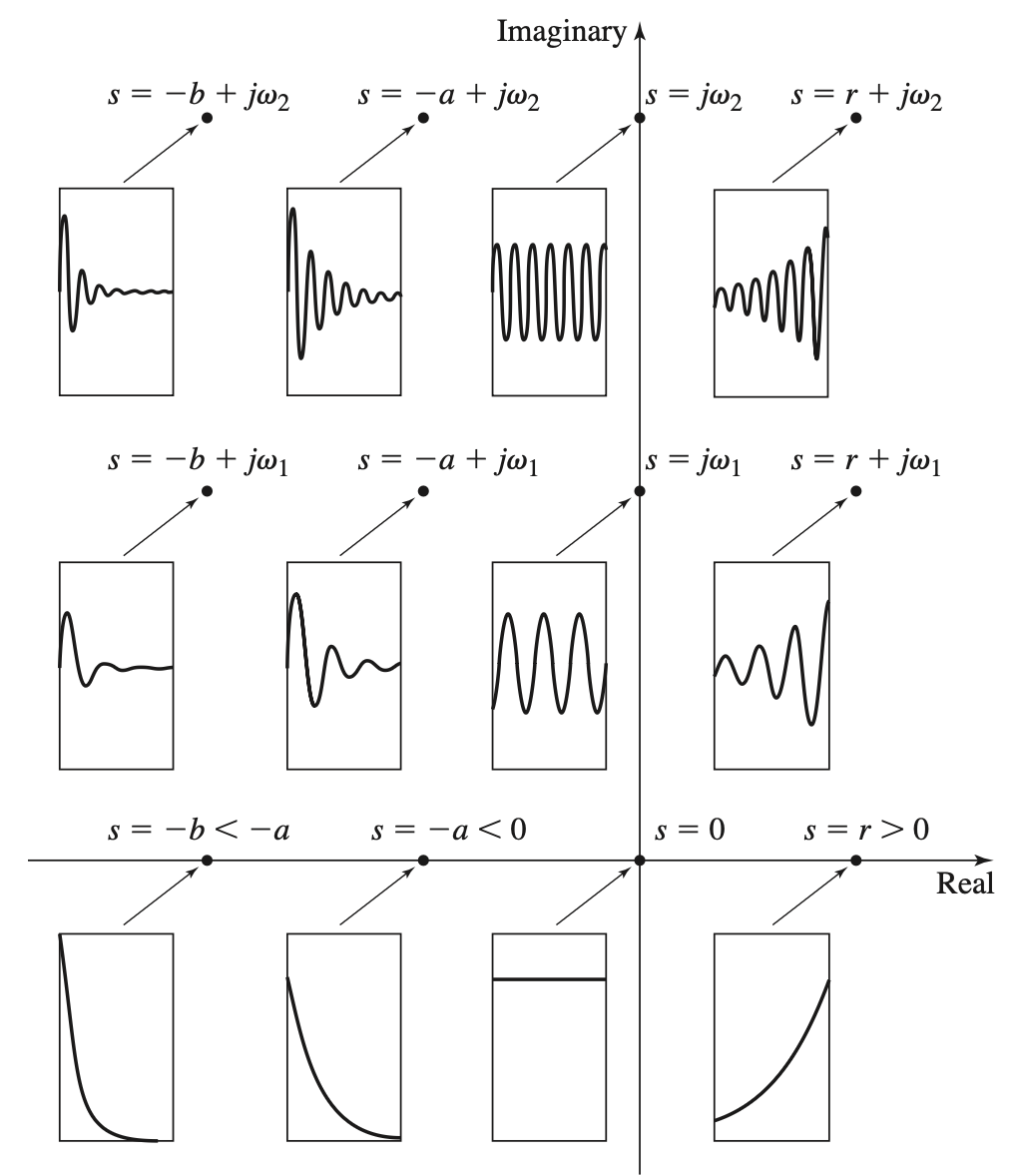
Effect of Root Location on free response
The system \(m \ddot{x} + b \dot{x} + kx = f(t)\) has a free response that depends on the roots of the characteristic polynomial \(m s^2 + b s + k\).
In general, these roots are complex, so we can plot them on the complex plane.
Underdamped, overdamped, etc.
| Zeta \(\zeta\) | \(b\) | Name | Typical Motion and roots of \(m s^2 + b s + k\) |
|---|---|---|---|
| \(\zeta = 0\) | \(b=0\) | Undamped | |
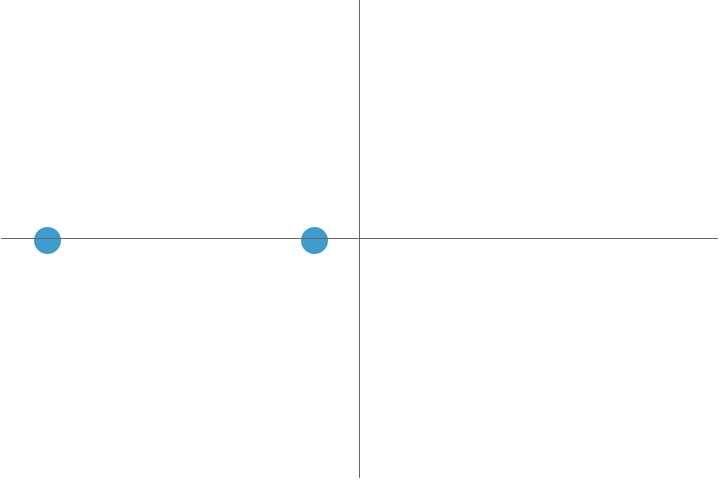
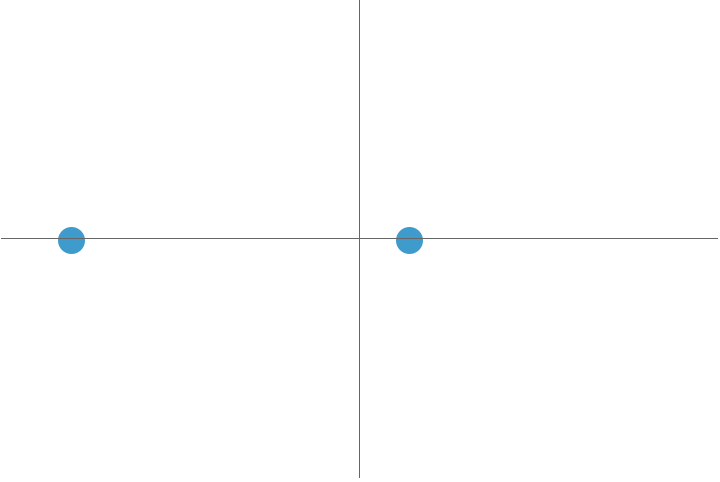
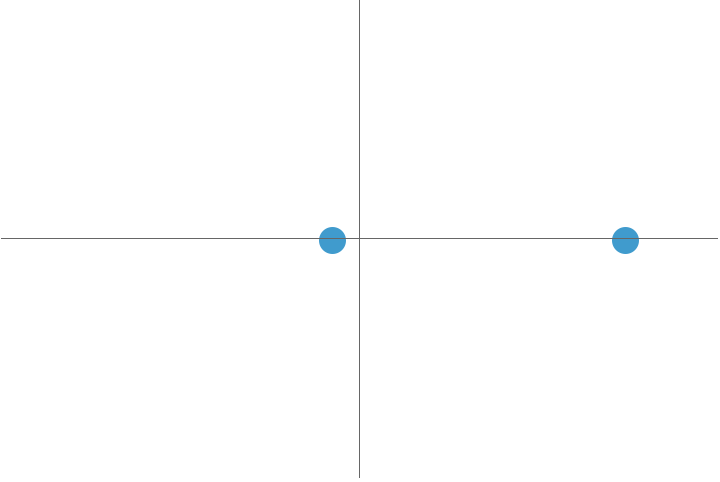
| \(\zeta < 1\) | \(b < \sqrt{4mk}\) | Underdamped | |
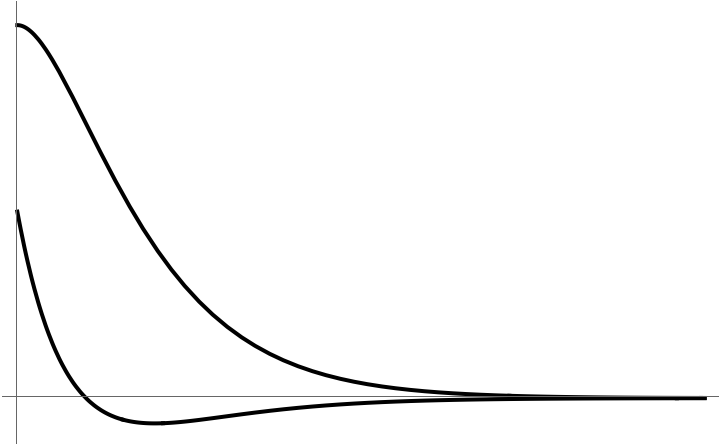
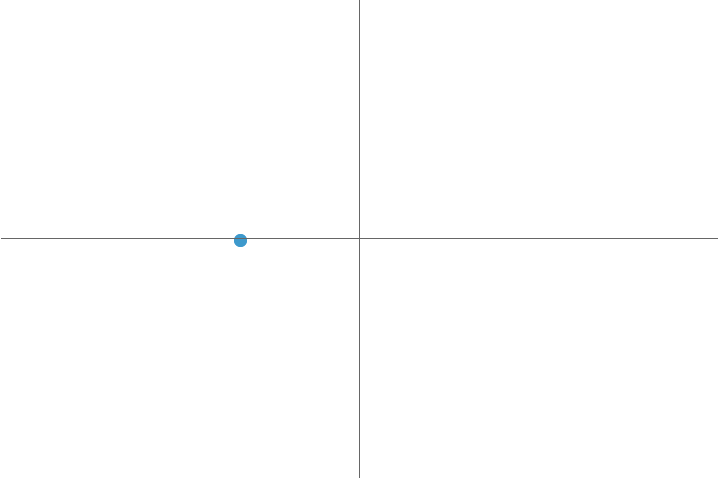
| \(\zeta = 1\) | \(b = \sqrt{4mk}\) | Critically damped |  |
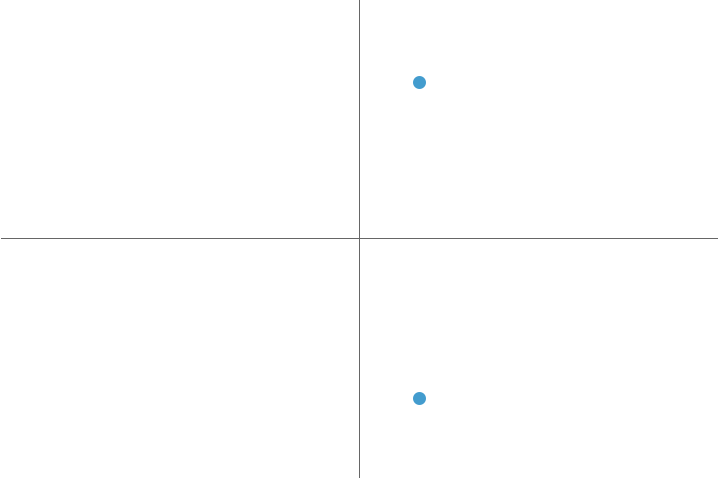
| \(\zeta > 1\) | \(b > \sqrt{4mk}\) | Overdamped |  |
Damped Natural Frequency and Time Constant for second-order systems
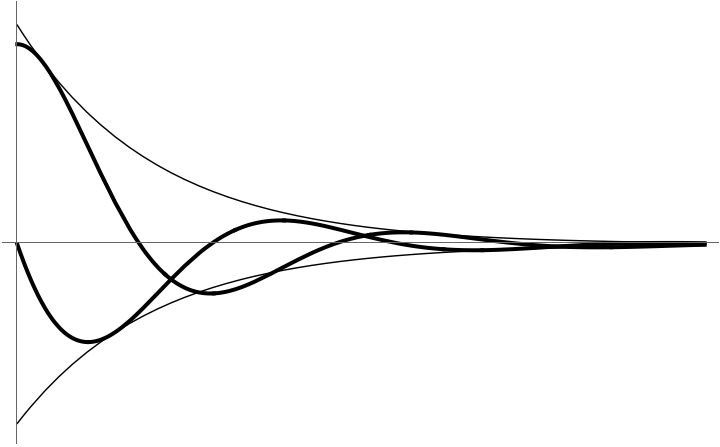
Underdamped second order systems (with \(\zeta < 1\)) have a time constant that characterizes how quickly or slowly they decay.
Solutions are multiples of \(x(t) = e^{({\color{blue}{r}} \pm i {\color{brown}{\omega}} )t}\).
- \({\color{brown}{\omega}}\) is responsible for the oscillation
- \({\color{blue}{r}}\) is responsible for the decay
When \(m \ddot{x} + b \dot{x} + k x = 0\) is written in the form \[\ddot{x} + 2 \zeta \omega_n x + \omega_n^2 x = 0,\]
the roots of the characteristic polynomial \[s^2 + 2 \zeta \omega_n s + \omega_n^2\] are \[s = - \zeta \omega_n \pm i \omega_n \sqrt{1-\zeta^2}\]
with the solution for \(x(t)\) given by \[x(t) = e^{- {\color{blue}{\zeta \omega_n}}t} \left( A \cos \left( t\, {\color{brown}{\omega_n \sqrt{1-\zeta^2}}} \right) + B \sin \left( t\, {\color{brown}{\omega_n \sqrt{1-\zeta^2}}} \right) \right)\]
- \(\displaystyle {\color{blue}{\frac{1}{\zeta \omega_n}}}\) is known as the time constant
- \({\color{brown}{\omega_n \sqrt{1-\zeta^2}}}\) is known as the damped natural frequency
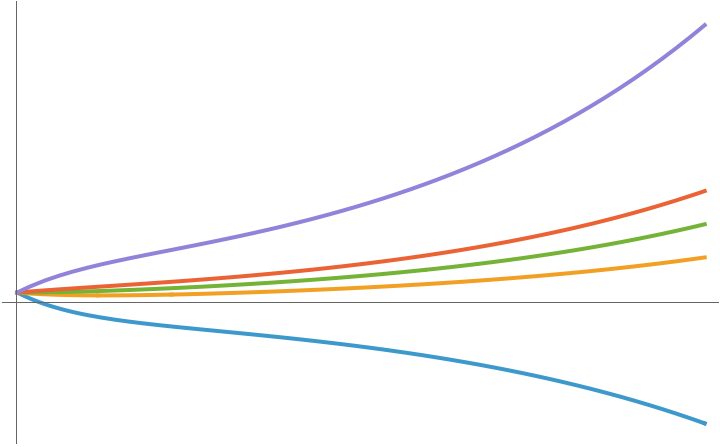
Step Response of a second-order system
Consider a spring-mass system starting from \(x = 0, \dot{x}=0\) that is subjected to a step function force \(f(t) = u_s(t)\)
\[\ddot{x} + 2 \zeta \omega_n \dot{x} + \omega_n^2 x = u_s(t)\]
- When \(\zeta < 1\), overshoot occurs
- When \(\zeta > 1\), there’s no overshoot
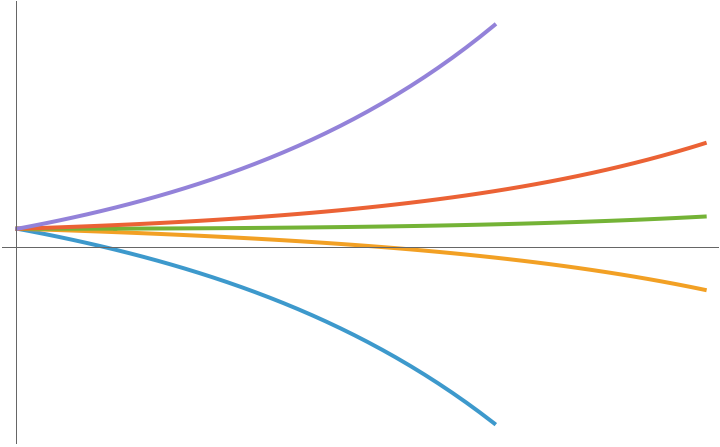
Impulse Response of a second-order system
Consider a spring-mass system starting from \(x = 0, \dot{x}=0\) that is subjected to a impulse function force \(f(t) = \delta(t)\)
\[\ddot{x} + 2 \zeta \omega_n \dot{x} + \omega_n^2 x = \delta(t)\]
- When \(\zeta > 1\), no oscillations occur
- When \(\zeta < 1\), there’s oscillations