Lecture 16
E12 Linear Physical Systems Analysis
March 19, 2026
At-rest displacement of vertical systems
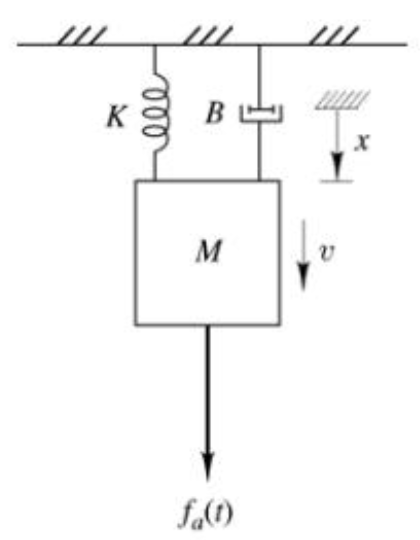
Typically, we choose the zero of \(x\) to be such that springs are at rest length. But here, intuition tells us that there will be a natural amount of extension to the spring due to gravity.
The governing equation is \[M \ddot{x} + B \dot{x} + K x = f_a(t) + M g\]
- Assume the mass is not moving: \(\dot{x} = \ddot{x} = 0.\)
- Solve for \(x\) if \(f_a=0\).
- Equation reduces to \(0 + 0 + K x = 0 + M g\) \(\implies x = \displaystyle \frac{M}{K}g\)
- Equilibrium position is \(x = M g / K\). Call it \(x_0\).
- Define a new variable \(z = x - x_0\)
- \(\dot{z} = \dot{x} + 0, \quad \ddot{z} = \ddot{z} + 0\)
- \(\displaystyle M \ddot{z} + B \dot{z} + K z + K \frac{Mg}{K} z = f_a(t) + M g\)
- Governing equation is \[M \ddot{z} + B \dot{z} + K z = f_a(t)\]
Pulleys
A pulley changes the direction of motion in a translational mechanical system.


Two types: Ideal and non-ideal
Ideal pulleys:
- The rope does not slip and moves at the same speed as the surface of the pulley wheel
- The rope remains taut but inextensible
- The pulley has no mass, stiffness, or damping
- Same tension on both sides of the rope
- The pulley has negligble inertia compared to the rest of the system.
Non-ideal pulleys:
- Have dynamics of their own and are not just passive transmitters of motion
- We might get to non-ideal pulleys later
- Need to apply Newton’s Laws in a rotating sense
Equations for a system with ideal pulley
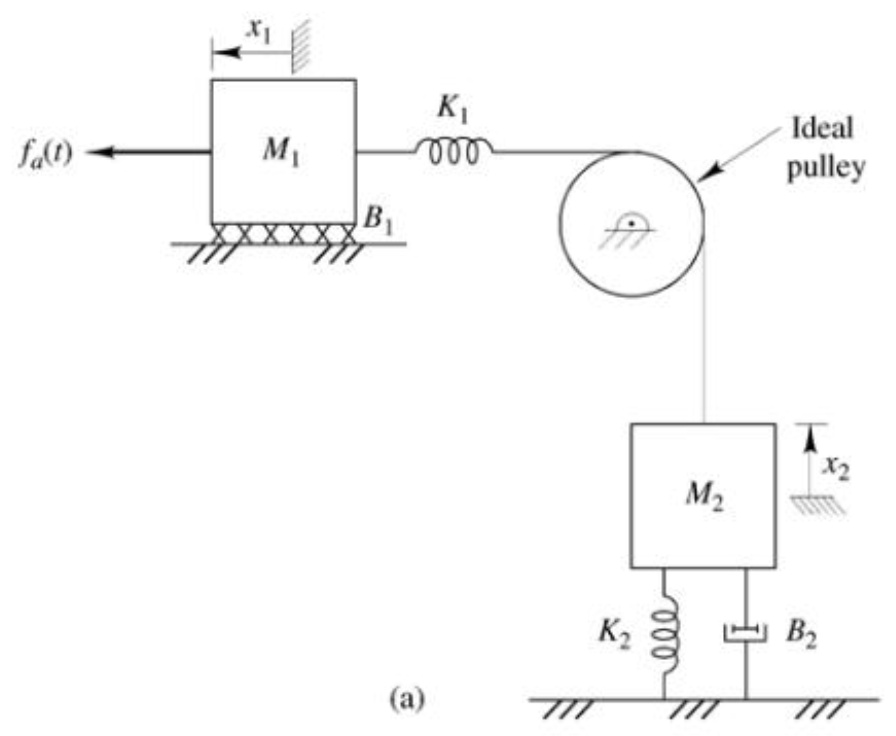
Write down the equations of motion for this system
\[ \begin{aligned} &M_1 \ddot{x}_1 + B_1 \dot{x}_1 + K_1 (x_1-x_2) &= f_a(t) \\ &M_2 \ddot{x}_2 + B_2 \dot{x}_2 - K_1 (x_1-x_2) + K_2 x_2 &= -M_2 g \end{aligned} \]
Parallel & Series Springs & Dashpots
| Arrangement | Springs | Dampers |
|---|---|---|
| Series | 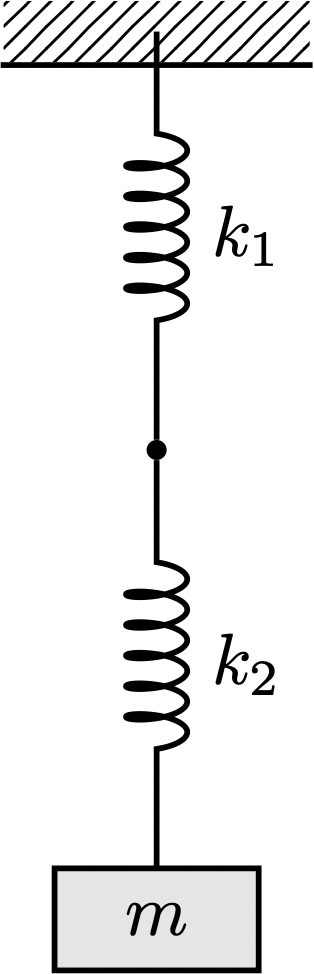 \(k_{\text{eq}} = \displaystyle \frac{k_1 k_2}{k_1+k_2}\) \(k_{\text{eq}} = \displaystyle \frac{k_1 k_2}{k_1+k_2}\) |
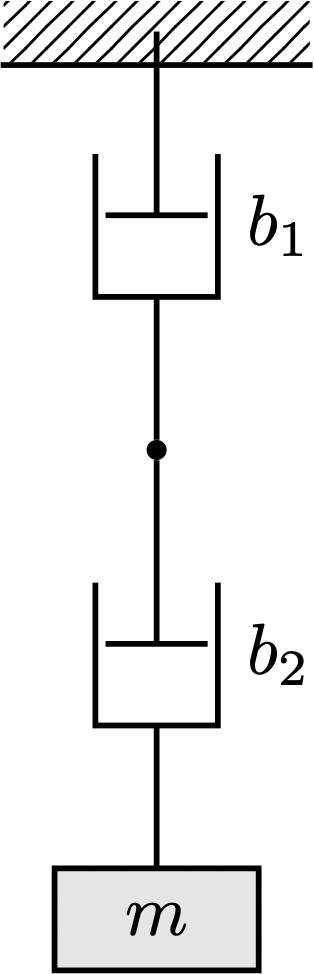 \(b_{\text{eq}} = \displaystyle \frac{b_1 b_2}{b_1+b_2}\) \(b_{\text{eq}} = \displaystyle \frac{b_1 b_2}{b_1+b_2}\) |
| Parallel | 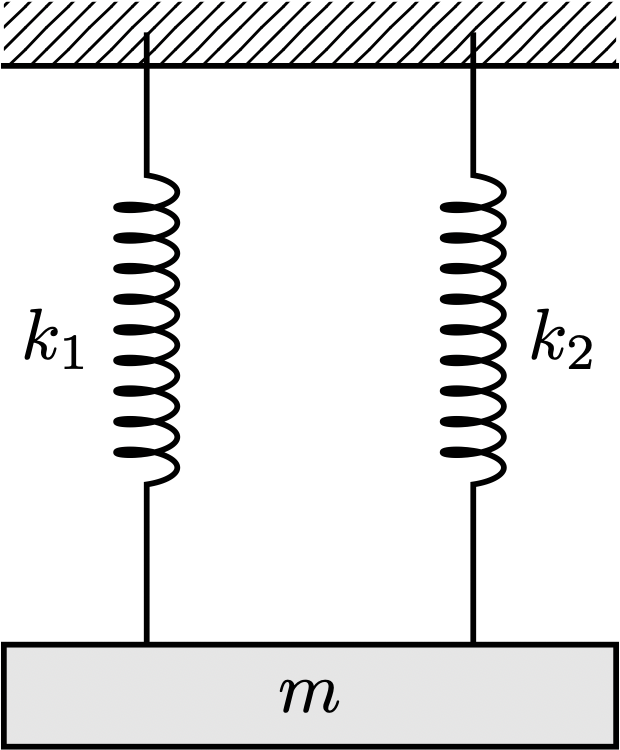 \(k_{\text{eq}} = k_1+k_2\) \(k_{\text{eq}} = k_1+k_2\) |
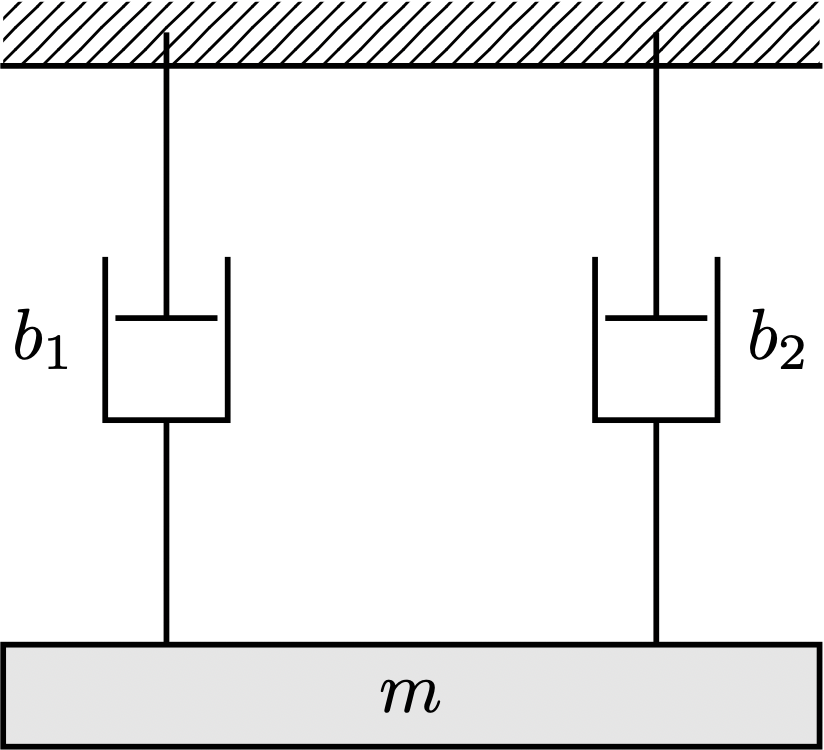 \(b_{\text{eq}} = b_1 + b_2\) \(b_{\text{eq}} = b_1 + b_2\) |
In-class activity with dashpots (and springs)


Use the provided syringe at different speeds and observe the force. Compare this with springs!