Lecture 2
E12 Linear Physical Systems Analysis
2026-01-22
Complex numbers
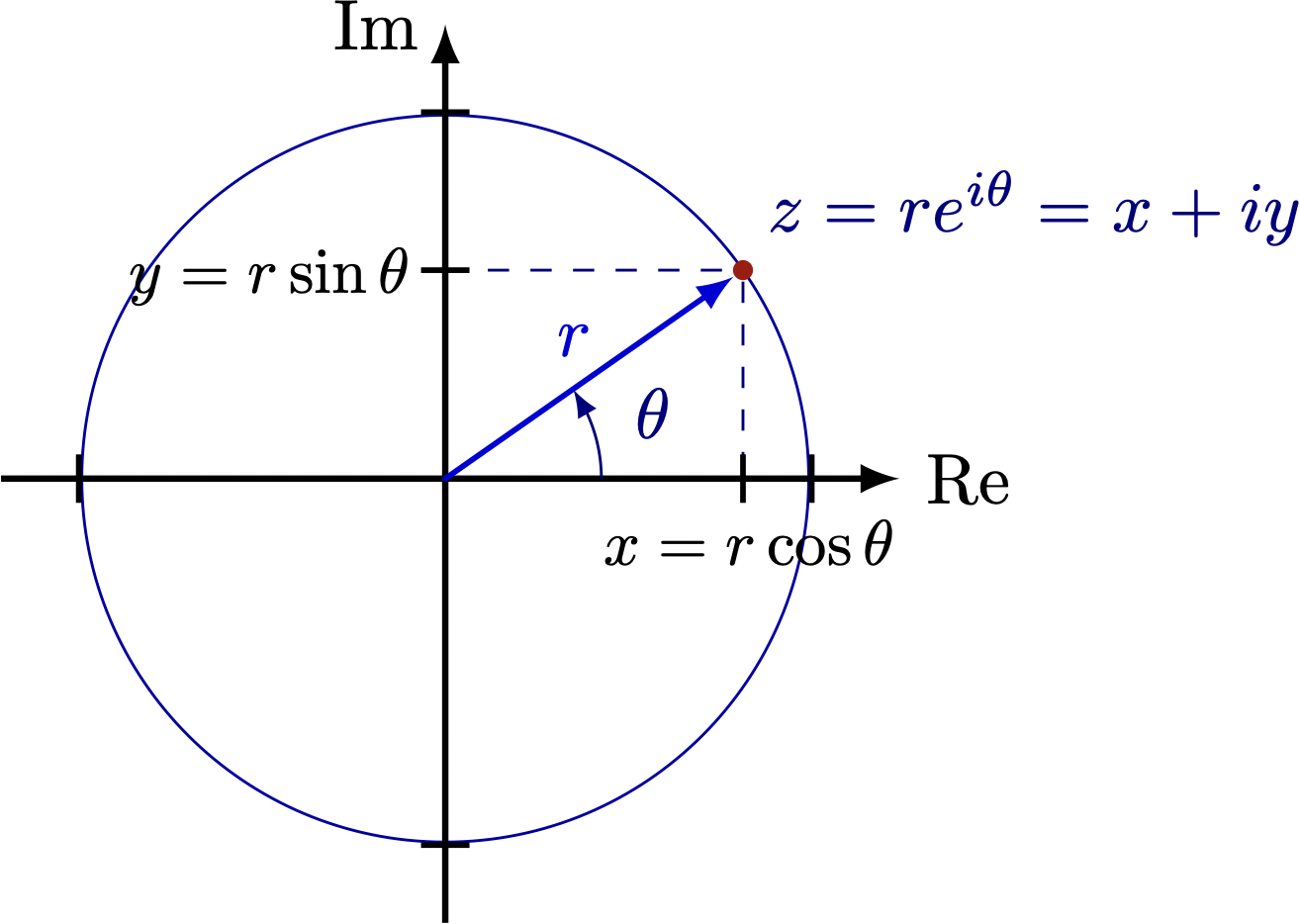
- A complex number \(z\) is the sum of a real part and an imaginary part \[z = x + i y\]
- where \(i\) is the imaginary unit \[i^2 \equiv -1 \]
- Complex numbers can be written in Cartesian or polar form. Magnitude of \(z\) is \(r\) and Argument of \(z\) is \(\theta\).
Practice with Complex Numbers
For these tasks, remember that any complex number \(z = x+ i y\) can be thought of as a vector pointing from the origin to \([x,y]\).
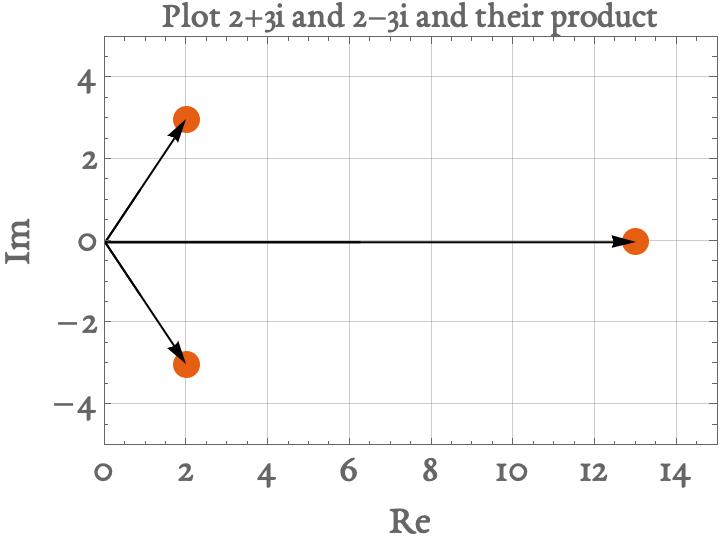
- Plot \(2+3i\) and its complex conjugate in the complex plane. Multiply these two numbers and interpret the result geometrically
- Calculate \(2 + 3i\) divided by \(3-7i\) and express the answer with no \(i\) in the denominator
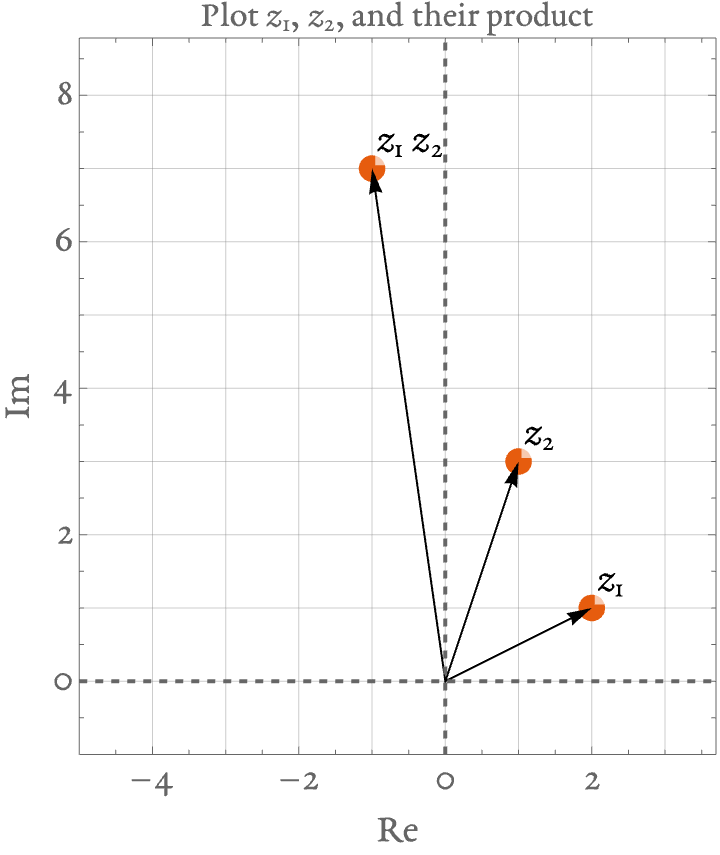
- Choose any two complex numbers \(z_1\) and \(z_2\) and plot on the complex plane. What does \(z_1 z_2\) represent geometrically
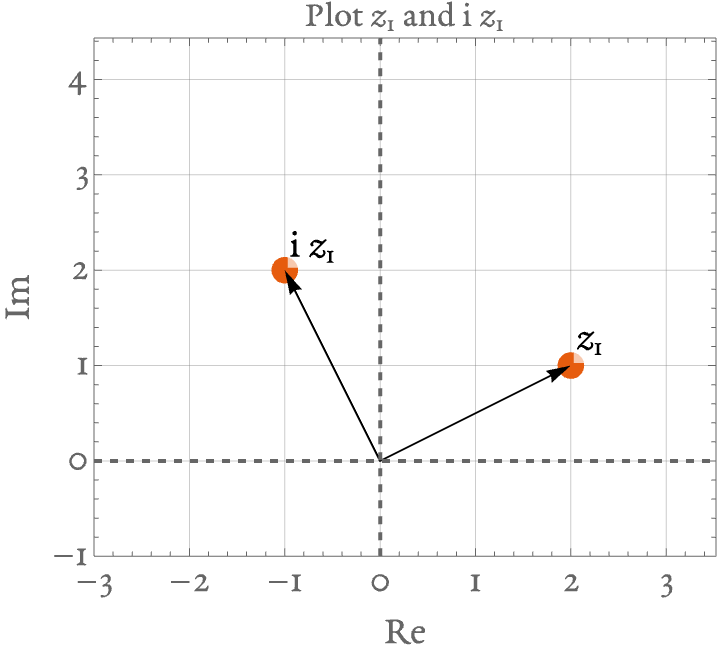
- Geometrically, what does multiplying by an imaginary number (start with \(1i\)) do to a number on the complex plane?
- Geometrically, what does multiplying by a real number do to a number on the complex plane?
- Derive Euler’s identity \[e^{i \pi} + 1 = 0\]
Answers below
The result is a real number equal to \(2^2+3^2\).
![]()
\[\frac{2+3i}{3-7i} = \frac{2+3i}{3-7i} \frac{3+7i}{3+7i} = \frac{27-5i}{9+49} = \frac{27}{58} - i \frac{5}{58} \]
Their arguments get added to each other and their magnitudes get multiplied to each other.
![]()
It rotates the number by 90 degrees.
![]()
It stretches the number by a factor.
To ‘prove’ (not in the mathematical sense) Euler’s identity, we have to notice that \(e^{i\pi} = -1.\) Why would this be the case? The answer is that, on the unit circle in the complex plane, the number \(z=-1+0i\) is located on the negative real axis and has ‘angle’ 180 degrees.
Physical Systems that change with time
Using the convention that the overdot represents a time-rate of change, we can write a first-order differential equation for a system that changes with time: \[\frac{d\boldsymbol{x}}{dt} \equiv \dot{\boldsymbol{x}} = f(\boldsymbol{x},t)\]
\(\boldsymbol{x}\): What system is like right now. Scalar or vector.
\(\dot{\boldsymbol{x}}\): Rate of change of \(x\) with respect to time.
An alternative approach:
What does ‘lumped parameters’ mean?
- Lumped parameters assumption allows us to use ordinary differential equations instead of partial differential equations to model the system.
‘Element Laws’
- In analyzing physical systems, we would like to ‘break up’ a complicated physical system into its constituent parts.
- For each part, we can write an ‘element law’, i.e., a law of physics that we assume the part (or ‘element’) will obey.
Element laws for (translational) mechanical systems
Mass
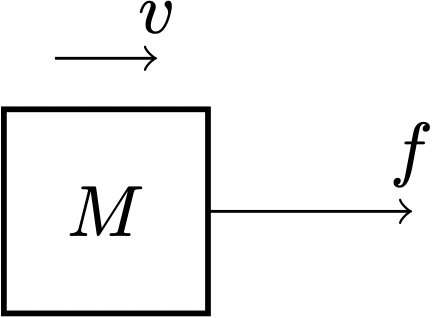
- \(\displaystyle M \frac{d v}{dt} = f\)
Element laws for (translational) mechanical systems
Friction
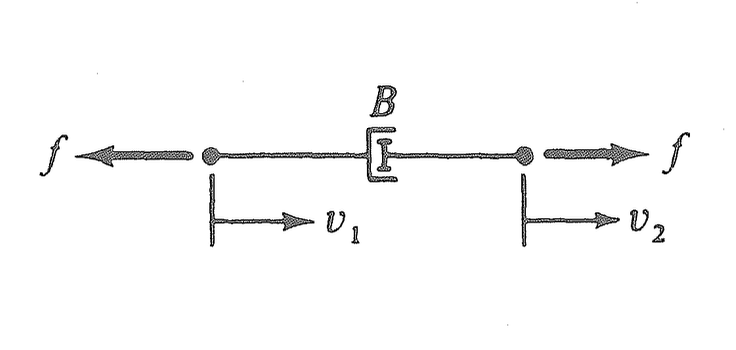
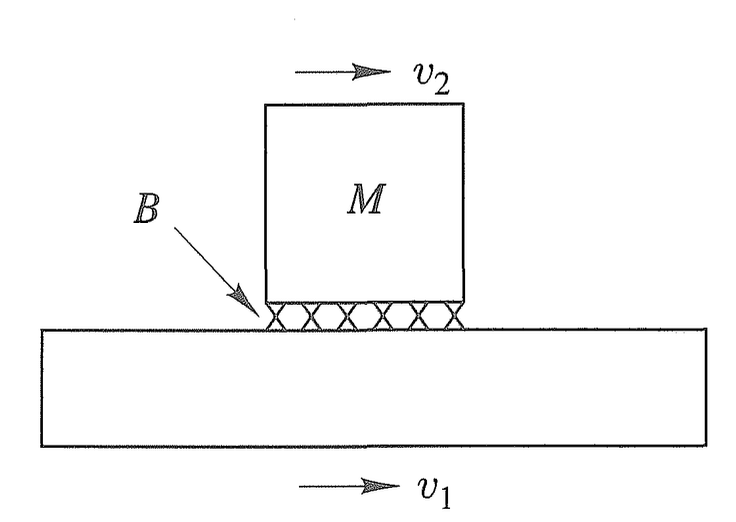
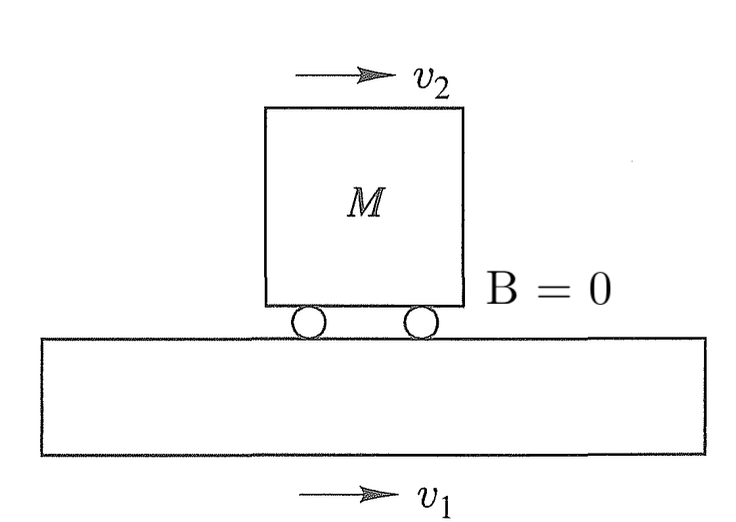
- \(\displaystyle B (v_2-v_1) = f\)
- in practice, we make models in which \(v_1\) or \(v_2 = 0\)
- force always opposes motion
Element laws for (translational) mechanical systems
Stiffness i.e. Springs
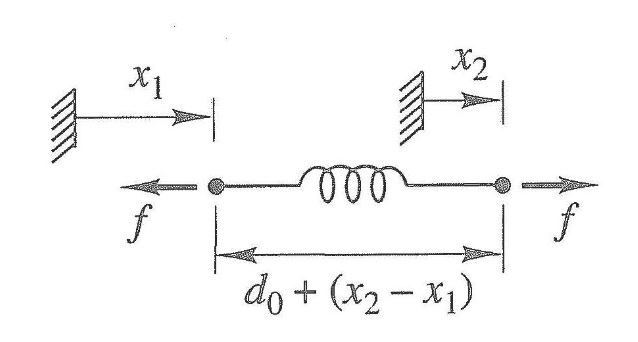
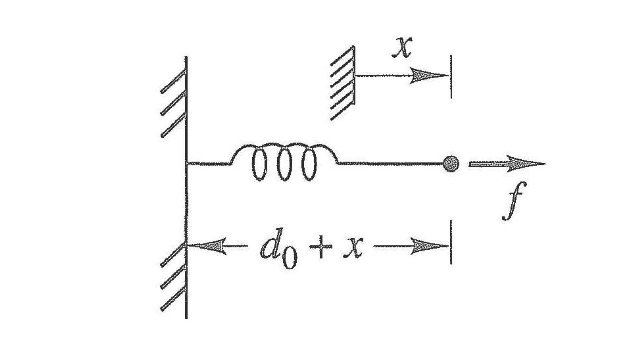
- \(\displaystyle K (x_2-x_1)) = f\) a.k.a Hooke’s Law
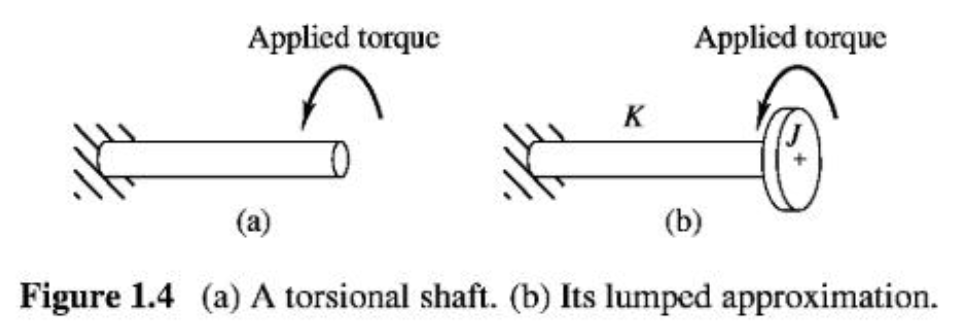
Element laws for rotational mechanical systems
Rotational analog for mass
Instead of Mass, we have Moment of Inertia \[M\frac{dv}{dt} = F \quad \rightarrow \quad J \frac{d \omega}{dt} = T\]
\(T\) is ‘torque’
\(\omega\) is the angular velocity in radians per second
\(J \omega\) is the angular momentum
\(J\) is the ‘Mass moment of inertia’ \(\displaystyle \int r^2 dm\)
- Formulas are available for many shapes’ moments of inertia
![]()

Element laws for rotational mechanical systems
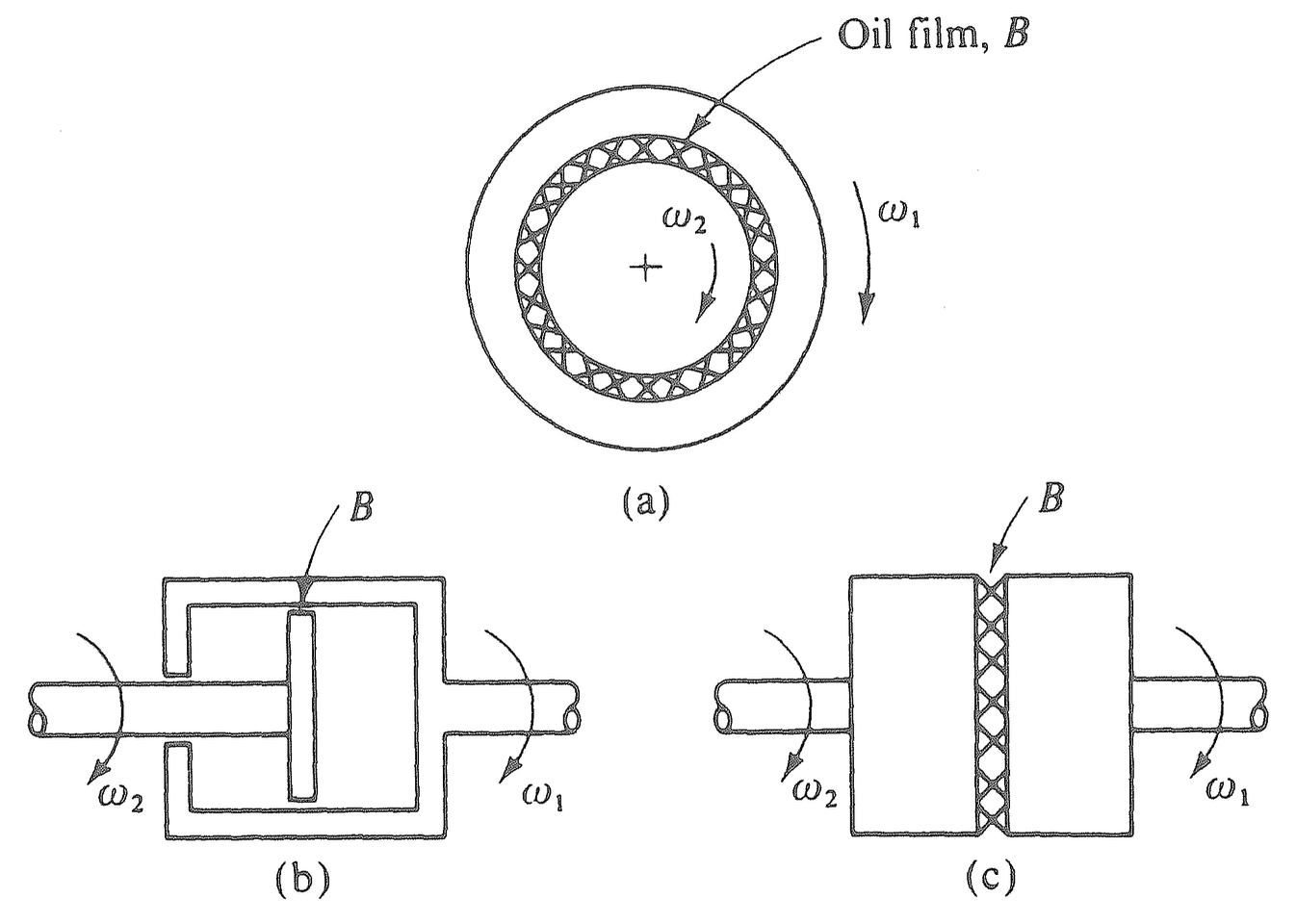
Rotational analog for friction
\[M\Delta v = F \quad \rightarrow \quad B \Delta \omega = T\]
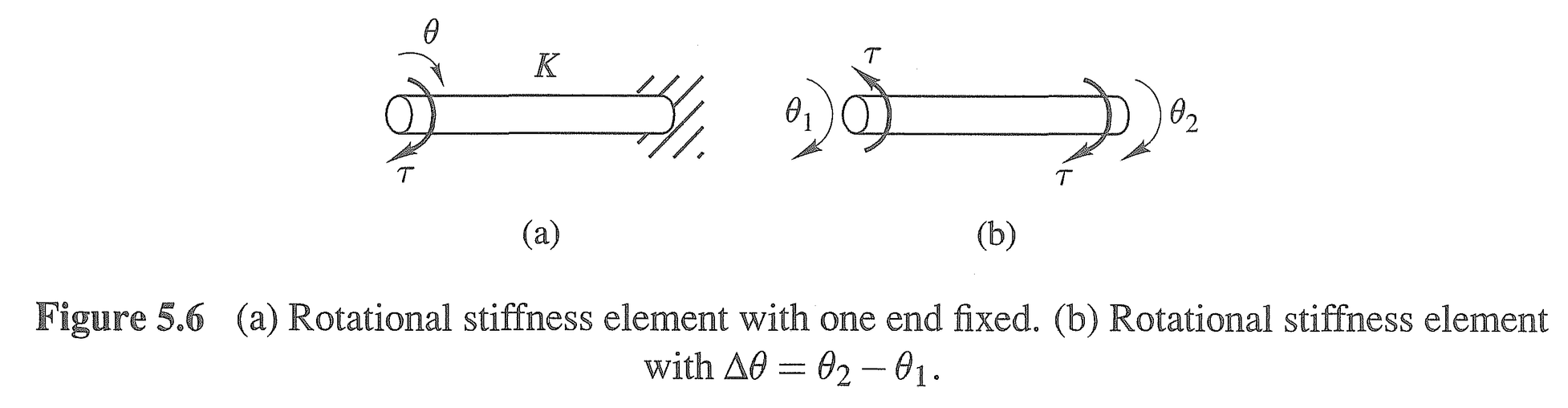
Element laws for rotational mechanical systems
Rotational analog for stiffness i.e. rotational springs
\[K (x_2-x_1)) = F \quad \rightarrow \quad K \Delta \theta = T\]
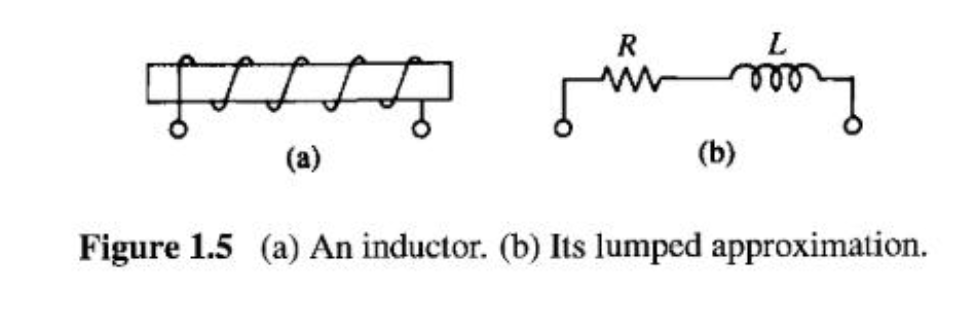
Element laws for electrical systems
Resistor
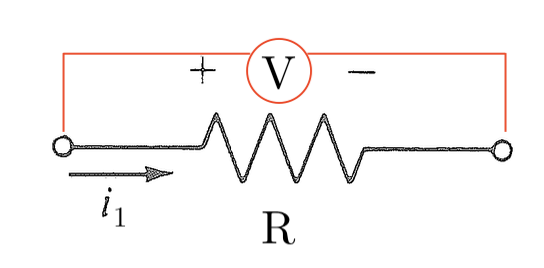
\(\displaystyle i_1 = \frac{1}{R} V\)
Capacitor
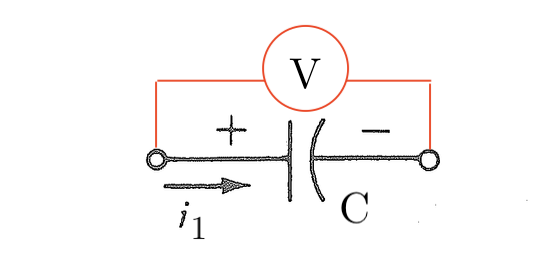
\(\displaystyle i_1 = C \frac{dV}{dt}\)
Inductor
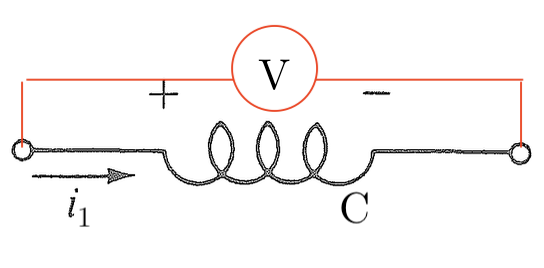
\(\displaystyle V = L \frac{d i_1}{dt}\)
Analyzing a linear physical system
Mechanical

\[M \frac{dv}{dt} + b v = 0\]
Electrical

\[\frac{dV}{dt} + \frac{1}{RC}V = 0\]
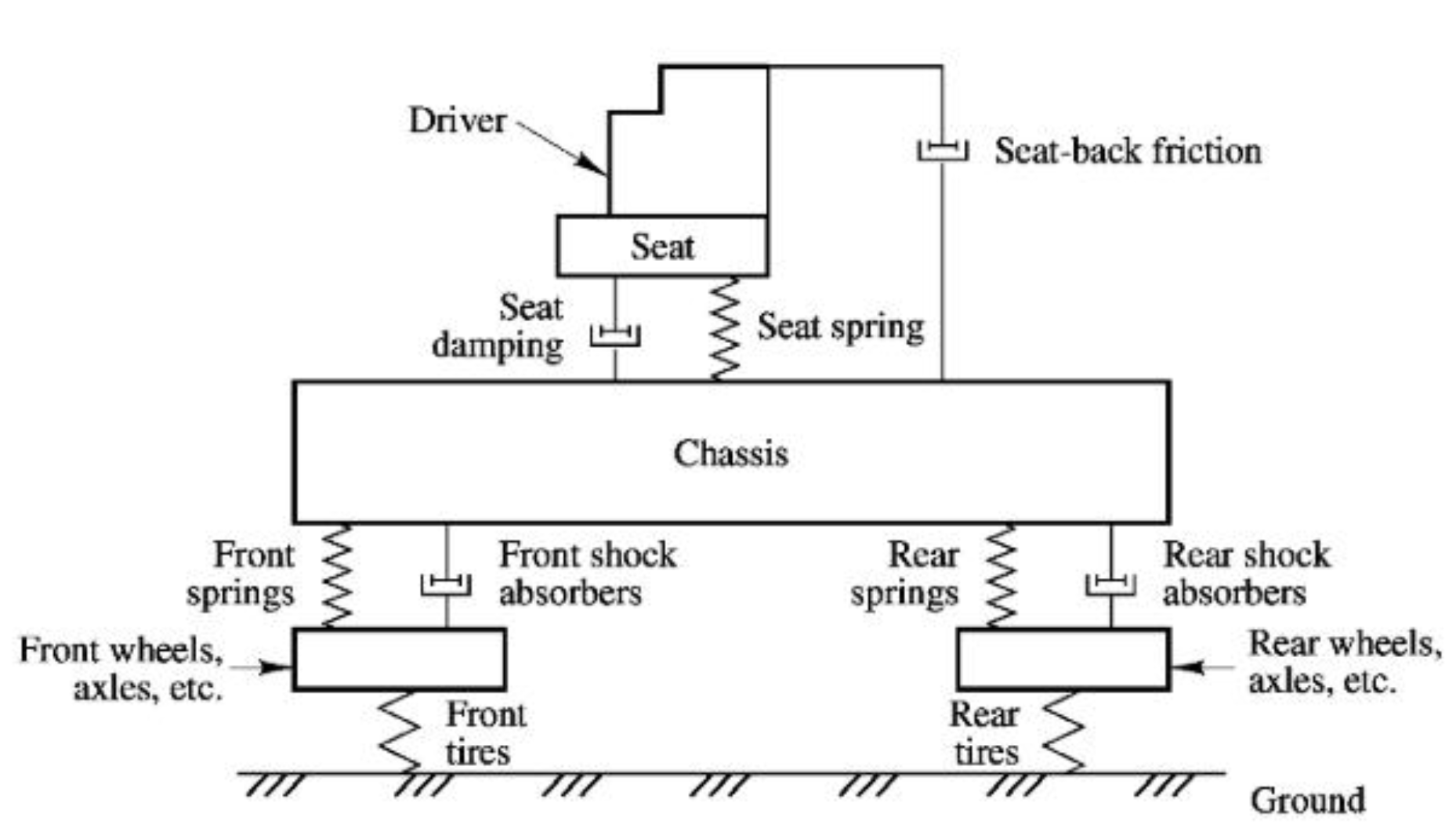
A coupled linear physical system
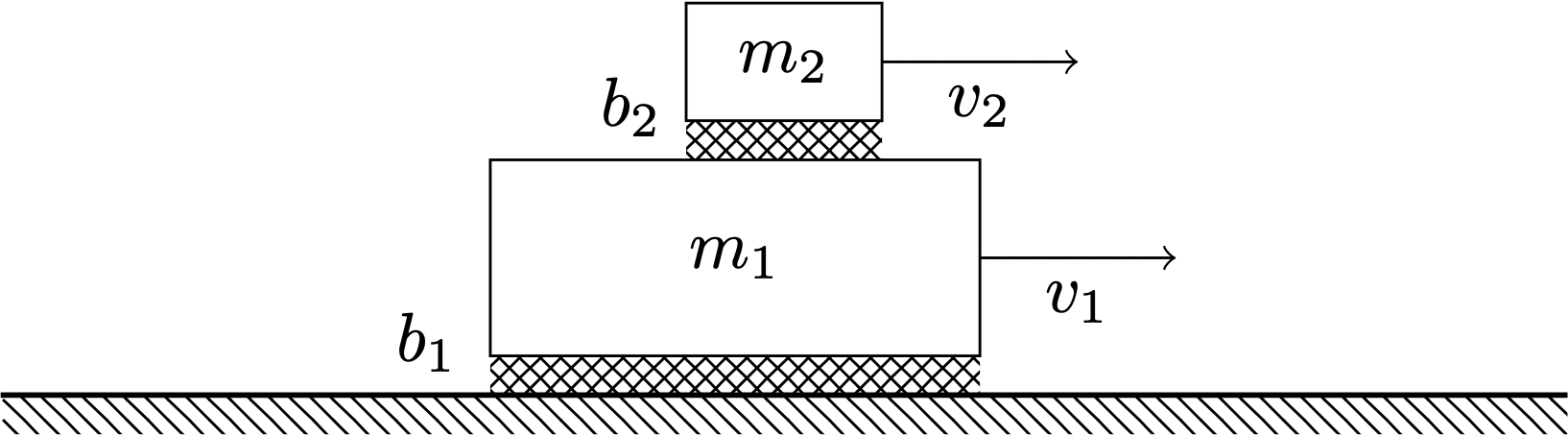
Let’s develop (not solve yet!) the equations for such a system.