Lecture 9
E12 Linear Physical Systems Analysis
February 17, 2026
Second-order Differential Equations
So far, we have looked at (linear) differential equations of the form \[
\dot{x} + ax = f(t), \quad \text{or} \quad \dot{x} = \underbrace{g(t,x)}_{\text{Linear in }x} \quad \text{ with } a > 0
\]
- We now turn to equations of the form \[
\ddot{x} + b \dot{x} + a x = f(t), \quad \text{or} \quad \ddot{x} = \underbrace{g(t,x,\dot{x})}_{\text{Linear in }x\text{ and }\dot{x}} \quad \text{ with } a,b > 0
\]
For simplicity, let’s start with \[
\boxed{\ddot{x} + ax = f(t)}, \quad \text{ with } a > 0
\]
Recall from Lecture 3 that we need two initial conditions now. \(\boxed{x(0) = \text{ some value}}\) & \(\boxed{\dot{x}(0) = \text{some other value}}\)
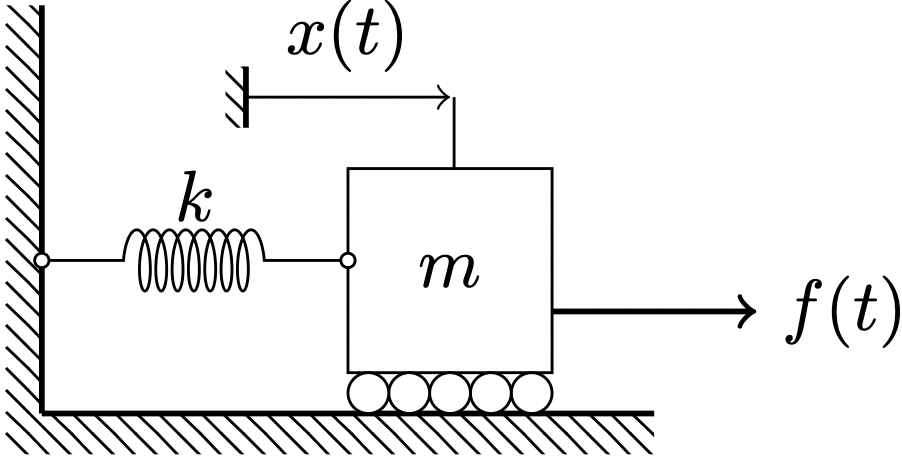
Physical Motivation: Spring-Mass System
The differential equation \[m\ddot{x} + kx = f(t)\] is a model for the following physical system:
![]()
How did we solve 1st-order Differential Equations?
Given \[\frac{dx}{dt} + ax = f(t)\] Separate \(x\) and \(t\) if possible. Integrate. e.g.: \[
\begin{aligned}
\frac{dx}{dt} + ax &= 3 \\
\int \frac{dx}{3-ax} &= \int dt \\
\frac{1}{-a}\log (3-ax) &= t + k \\
\log (3-ax) &= -at + k_2 \\
e^{\log (3-ax)} &= e^{-at + k_2} \\
3-ax &= k_3 e^{-at} \\
& ...
\end{aligned}
\]
Another approach: ‘Guess’
- Look closely at \[\dot{x} + ax = 0 \tag{1}\]
- “The first derivative of \(x(t)\)” is proportional to \(x(t)\).
- What functions have this property?
- Is the derivative of \(2t\) proportional to \(2t\)? no
- Is the derivative of \(\cos 2t\) proportional to \(\cos 2t\)? no
- Is the derivative of \(\log 2t\) proportional to \(\log 2t\) ? no
- Is the derivative of \(e^{2t}\) proportional to \(e^{2t}\)? YES
- Plug \(e^{\lambda t}\) into Equation 1 \[
\lambda e^{\lambda t} + a e^{\lambda t} = 0 \implies (\lambda + a) e^{\lambda t} = 0
\]
- So if \(\lambda = -a\), then \(\boxed{e^{\lambda t}}\) is a solution!
Guessing a solution to second-order equations
- Look closely at \[\ddot{x} + ax = 0 \tag{2}\]
- “The second derivative of \(x(t)\)” is proportional to \(x(t)\).
- What functions have this property?
- Is the 2nd derivative of \(2t^3\) proportional to \(2t^3\)? no
- Is the 2nd derivative of \(\log 2t\) proportional to \(\log 2t\) ? no
- Is the 2nd derivative of \(\cos 2t\) proportional to \(\cos 2t\)? YES
- Plug \(\cos \omega t\) into Equation 2 \[
x(t) = \cos \omega t \implies \dot{x}(t) = - \omega \sin \omega t \implies \ddot{x}(t) = - \omega^2 \cos \omega t
\] \[
-\omega^2 \cos \omega t + a \cos \omega t= 0 \implies (- \omega^2 + a) \cos \omega t = 0
\]
- So if \(\omega^2 = a,\) \(\boxed{\cos \omega t}\) is a solution!
Sines and Cosines solve \(\ddot{x} + ax = 0\)
- The same argument applies to both \(\sin \omega t\) and \(\cos \omega t\).
- Try \(x_1(t) = \cos \omega t\)
- Then \(\ddot{x}_1 = -\omega^2 \cos \omega t\)
- Does it satisfy \(\ddot{x}_1 + ax_1 = 0\) ? \[(-\omega^2+a) \cos \omega t = 0\]
- Try \(x_2(t) = \sin \omega t\)
- Then \(\ddot{x}_2 = -\omega^2 \sin \omega t\)
- Does it satisfy \(\ddot{x}_2 + ax_2 = 0\) ? \[(-\omega^2+a) \sin \omega t = 0\]
- Both \(\sin \omega t\) and \(\cos \omega t\) solve \(\ddot{x} + ax = 0\), as long as \(\omega^2 = a\)
The linearity of \(\ddot{x} + ax = 0\)
\[\ddot{x} + ax = 0\]
- If a function \(x_1(t)\) solves Equation 2 and another function \(x_2(t)\) solves Equation 2 then any linear combination of \(x_1\) and \(x_2\) also solves Equation 2. For example:
- \(3 x_2(t)\) is a solution.
- \(2x_1(t) - 3 x_2(t)\) is a solution
- \(x_1(t) + x_2(t)^2\) is not a solution
- \(x_1(t) x_2(t)\) is not a solution
- Now that we know that \(\cos \omega t\) and \(\sin \omega t\) are solutions, the solution to Equation 2 can be written as \[A \cos \omega t + B \sin \omega t, \quad \omega^2 = a\] for any \(A\) and \(B\).
A note about the right hand side
If our goal is to solve problems of the kind
![]()
Why do we study \[\ddot{x} + ax = 0 \tag{3}\] instead of \[\ddot{x} + ax = f(t) \tag{4}\]
Guessing a solution to \(\ddot{x} + ax = 0\) using exponentials instead
\[\ddot{x} + ax = 0, \qquad a > 0\]
The exponential function \(e^x\) or \(\exp x\) is that unique function whose derivative is equal to itself.
Let’s try \(x_3(t) = e^{\lambda t}\). Is this a solution?
\[\underbrace{e^{\lambda t}}_{x_3(t)}\rightarrow \quad \boxed{d/dt} \quad \rightarrow \underbrace{\lambda e^{\lambda t}}_{\dot{x}_3(t)} \rightarrow \quad \boxed{d/dt} \quad \rightarrow \underbrace{\lambda^2 e^{\lambda t}}_{\ddot{x}_3(t)}\]
Now plug \(x_3(t)\) into Equation 2 and check \[
\begin{aligned}
\ddot{x}_3 + ax_3 &= 0 \\
\lambda^2 e^{\lambda t} + a e^{\lambda t} &= 0 \\
{(\lambda^2 + a)} e^{\lambda t} &= 0
\end{aligned}
\] - This is only zero if \(\lambda^2 +a = 0\), but \(a>0\). uh-oh.
What to do with \(\lambda^2 + a = 0\) when \(a>0\)
There are no real values of \(\lambda\) that solve the equation \(\lambda^2 + a = 0\) when \(a>0\)
But there are imaginary ones!
Let \(\lambda = +i \omega\) and \(\lambda = - i \omega\) with \(\omega \in \mathbb{R}\). Then \[
(i \omega)^2 + a = i^2 \omega^2 +a = - \omega^2 + a
\] and this is zero when \(\omega^2 = a, \omega = \pm \sqrt{a}\)
Similarly \[
(-i \omega)^2 + a = (-1)^2 i^2 \omega^2 +a = - \omega^2 + a
\] and this is zero when \(\omega^2 = a, \omega = \pm \sqrt{a}\)
So \(\lambda = \pm i \omega, \, \omega \in \mathbb{R}\) is a solution to \(\lambda^2 + a = 0\)
Exponential solutions to \(\ddot{x} + ax = 0\)
To summarize,
\(x(t) = e^{\lambda t}\) is a solution to Equation 2 if \[\lambda = \pm i \omega, \quad \omega^2 = a, \quad a,\omega > 0\]
\[\boxed{x(t) = e^{\pm i \omega t}}\]
Initial Value Problem
![]()
Solve the differential equation \[\ddot{x} + ax = 0, \quad a > 0 \] subject to the initial condition on position \[x(0) = x_0\] and the initial condition on velocity \[\dot{x}(0) = v_0\] using the trigonometric ‘guess’ \(x(t) = A \cos \omega t + B \sin \omega t\)
- Solution: \[
\begin{aligned}
x(t) = x_0 \cos \omega t + \frac{v_0}{\omega} \sin \omega t,
\end{aligned}
\] where \(\omega^2 = a\)
A spring-mass system released from rest
Solve the differential equation \[\ddot{x} + ax = 0, \quad a > 0 \] subject to the initial condition on position \[x(0) = 1.0\] and the initial condition on velocity \[\dot{x}(0) = 0.0\]
![]()
A spring-mass system released at speed
Solve the differential equation \[\ddot{x} + ax = 0, \quad a > 0 \] subject to the initial condition on position \[x(0) = 0.0\] and the initial condition on velocity \[\dot{x}(0) = 1.0\]
![]()
Compare initial \(x(0)\) with initial \(\dot{x}(0)\)
![]()
![]()
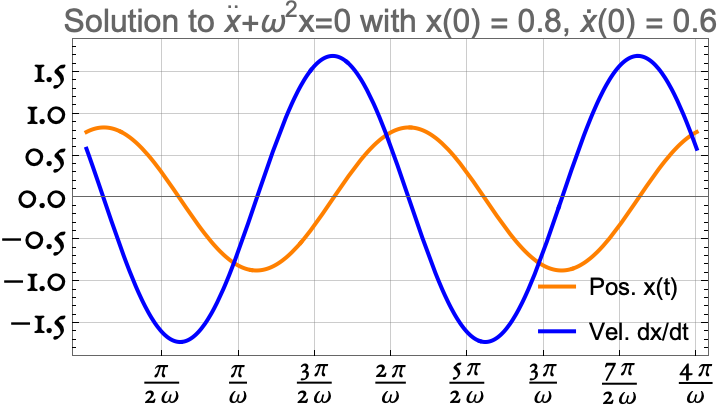
A spring-mass system released with nonzero position and velocity
Solve the differential equation \[\ddot{x} + ax = 0, \quad a > 0 \] subject to the initial condition on position \[x(0) \neq 0\] and the initial condition on velocity \[\dot{x}(0) \neq 0\]
![]()
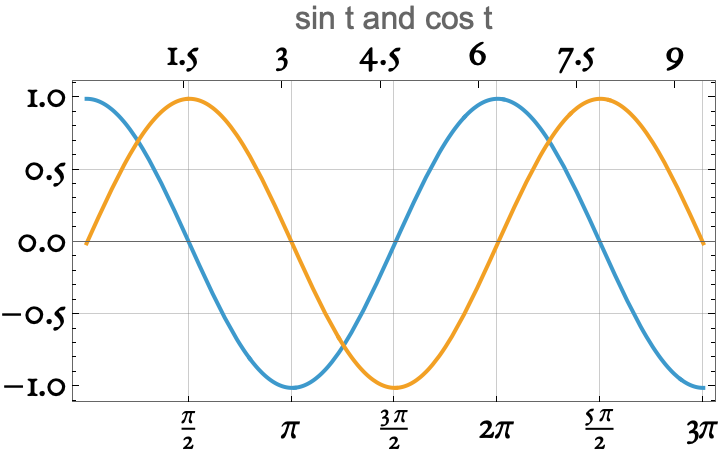
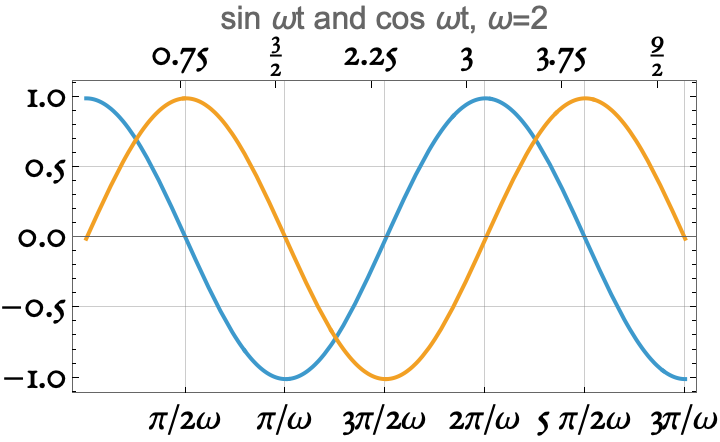
Recall some features of sine and cosine
![]()
![]()
- The period of \(\cos \omega t\) and of \(\sin \omega t\) is \(2\pi/\omega\) seconds
- When \(\cos \omega t\) is at zero, \(|\sin \omega t
|\) is at a maximum
- When \(\sin \omega t\) is at zero, \(|\cos \omega t
|\) is at a maximum
- \(\cos \omega t\) is (a constant times) the derivative of \(\sin \omega t\) with respect to \(t\)
- \(\cos \omega t\) is a phase-shifted version of \(\sin \omega t\)
A closer look at the solution