Problem Set 3 Solutions
ENGR 12, Spring 2026.
Solutions
1 Laplace Transform
1.1 Computing the integral explicitly without using the table
Using the definition of the Laplace Transform given in lecture, determine the Laplace Transform of the function \(x(t) = c t\) by integration. The result should be a function of \(s\) and \(c\).
Note that the integration by parts formula can be used to integrate \(\int t e^{-st} dt\) with \(u = t\), \(du = dt\), \(v=-\frac{1}{s} e^{-st}\), and \(dv=e^{-st}dt\). Then, we can use the rule \(\int u dv = vu-\int v du\). \[ \begin{aligned} \mathcal{L}[ct] &= \int_0^{\infty} ct e^{-st} dt \\ &= c \left( \left.-\frac{t}{s} e^{-st} \right|_0^{\infty} - \int_0^{\infty} \frac{1}{-s} e^{-st} dt \right) \\ &= c \left( \left.- \frac{t}{s}e^{-st} \right|_0^{\infty} + \frac{1}{s} \int_0^{\infty} e^{-st} dt \right) \\ &= c \left( \left.- \frac{t}{s}e^{-st} \right|_0^{\infty} + \left. \frac{1}{-s^2} e^{-st}\right|_0^{\infty} \right) \end{aligned} \] Applying the limits and using the idea that \(e^{-\infty}\) goes to zero and \(e^{0}\) goes to unity, we can write \[ \begin{aligned} \mathcal{L}[ct] &= c \left( (0 - 0) + \frac{1}{-s^2} \left( e^{-\infty} - e^{0} \right) \right) \\ &= c \left(\frac{1}{-s^2} \left( - 1 \right) \right) \\ &= \frac{c}{s^2} \end{aligned} \]
1.2 Deriving expressions for the Laplace Transform using the table
This question asks for a derivation of a result that you already know from the table. Thus, you cannot simply copy the result from the table; you have to ‘prove’ it mathematically.
Show that the Laplace Transform of the function \(\sin \omega t\) is \(\displaystyle \frac{\omega}{s^2+\omega^2}\).
Start by noting that \[e^{i \omega t} = \cos \omega t + i \sin \omega t\] If we subtract from the above complex number its complex conjugate, we will have \[ \begin{aligned} e^{i \omega t} - \overline{e^{i \omega t}} = &+ \cos \omega t + i \sin \omega t \\ &- \cos \omega t + i \sin \omega t \\ &= 0 + 2i \sin \omega t \end{aligned} \] With \(z \equiv e^{i \omega t}\), we can therefore say that \[\frac{1}{2i} (z- \overline{z}) = \sin \omega t\] and using the definitions of \(z\) and its complex conjugate, we have \[ \sin \omega t = \frac{1}{2i} \left( e^{i \omega t} - e^{-i \omega t}\right) \] where we have used the fact that \(\overline{e^{i \theta}} = e^{-i \theta}\). Now, let’s use the entries in the table of transform pairs for exponential functions and the linearity property to find \(\mathcal{L}[\sin \omega t]\). \[ \begin{aligned} \mathcal{L}[ \sin \omega t] &= \mathcal{L} \left[ \frac{1}{2i} \left( e^{i \omega t} - e^{-i \omega t}\right) \right] \\ &= \frac{1}{2i} \mathcal{L}\left[ e^{i \omega t}\right] - \frac{1}{2i} \mathcal{L}\left[ e^{-i \omega t}\right] \end{aligned} \] Since \(\mathcal{L} e^{-at} = \frac{1}{s+a}\), by the linearity property \(\mathcal{L} e^{i \omega t} = \frac{1}{s-i \omega}\). Similarly, \(\mathcal{L} e^{-i \omega t} = \frac{1}{s+i \omega}\) Thus, we can collect what we’ve learned so far like so \[ \begin{aligned} \mathcal{L} [\sin \omega t] &= \mathcal{L}\left[e^{i \omega t} - e^{-i \omega t} \right] \\ &= \frac{1}{2i} \left( \frac{1}{s-i\omega} - \frac{1}{s+i \omega}\right) \\ &= \frac{1}{2i} \cdot \frac{(s+ i \omega) - (s- i\omega)}{(s-i\omega)(s+i\omega)} \\ &= \frac{1}{2i} \frac{2i \omega}{s^2+\omega^2} \\ &= \frac{\omega}{s^2+\omega^2}, \quad Q.E.D. \end{aligned} \]
1.3 Computing Laplace transforms using the table
Compute the Laplace Transform of the following functions and give your answers as rational functions of the frequency \(s\). For each answer, write down the order of the numerator polynomial and the order of the denominator polynomial.
Use the table of Laplace transform pairs.
- \(f(t) = 1 + 2t - 3t^3\)
We can calculate individually the Laplce Transforms of the components of \(f\): \[ \begin{aligned} \mathcal{L}[f(t)] &= \mathcal{L}[1] + \mathcal{L}[2t] +\mathcal{L}\left[3t^3\right] \\ &= \frac{1}{s} +\frac{2}{s^2} + 3\frac{6}{s^4} \\ &= \frac{1}{s} + \frac{2}{s^2} + \frac{18}{s^4} \\ &= \frac{s^3}{s^4} + \frac{2s^2}{s^4} + \frac{18}{s^4} \\ \implies F(s) &= \frac{s^3 + 2s^2 + 18}{s^4} \end{aligned} \] The order of the numerator is \(3\), and the order of the denominator is \(4\).
- \(f(t) = \cos \omega_1 t + \cos \omega_2 t\)
We can calculate individually the Laplce Transforms of the components of \(f\): \[ \begin{aligned} \mathcal{L}[f(t)] &= \mathcal{L}[\cos \omega_1 t] + \mathcal{L}[\cos \omega_2 t] \\ &= \frac{s}{s^2 + \omega_1^2} + \frac{s}{s^2 + \omega_2^2} \\ &= \frac{s(s^2 + \omega_2^2)}{(s^2 + \omega_1^2)(s^2 + \omega_2^2)} + \frac{s(s^2 + \omega_1^2)}{(s^2 + \omega_1^2)(s^2 + \omega_2^2)} \\ \implies F(s) &= \frac{2s^3 + (\omega_1^2 + \omega_2^2)s}{(s^2 + \omega_1^2)(s^2 + \omega_2^2)} \end{aligned} \] The order of the numerator is \(3\), and the order of the denominator is \(4\).
- \(f(t) = t^3 e^{-5t}\)
Using the table, we know of the Laplace Transform pair \[\mathcal{L} \left[ \frac{1}{(n-1)!} t^{n-1} e^{-at}\right] = \frac{1}{(s+a)^n}.\]
Thus, if \(n=4\) and \(a=5\), \[\mathcal{L} \left[ \frac{1}{(4-1)!} t^{4-1} e^{-5t}\right] = \frac{1}{(s+5)^4}\] and by the linearity property
\[ \frac{1}{3!} \mathcal{L} \left[t^{4-1} e^{-5t}\right] = \frac{1}{(s+5)^4} \] which means that \[ \mathcal{L}[t^3 e^{-5t}] = \boxed{\frac{6}{(s+5)^4}}, \] which is what the question asked for. The order of the numerator is \(0\), and the order of the denominator is \(4\).
1.4 Computing Inverse Laplace Transforms using the table
For each of the following functions \(F(s)\), find \(f(t)\), the result of applying the inverse Laplace Transform \(\mathcal{L}^{-1}\) to \(F\).
Use the table of Laplace transform pairs.
- \[F(s) = \frac{3s+1}{s(s+4)}\]
\[ \begin{aligned} F(s) = \frac{3s+1}{s(s+4)} &= \frac{A}{s} + \frac{B}{s+4} \\ \frac{A(s+4) + Bs}{s(s+4)} &= \frac{3s+1}{s(s+4)} \\ \implies As + 4A + Bs &= 3s+1 \\ \implies 4A = 1, \quad A &= 1/4 \\ \text{and } A+B = 3 \implies B &= 11/4 \end{aligned} \] so \[F(s) = \frac{1/4}{s} + \frac{11/4}{s+4}\] and by inspection of the table, this means that \[f(t) = \frac{1}{4} + \frac{11}{4}e^{-4t}\]
- \[F(s) = \frac{s}{s^2+3} + \frac{\sqrt{3}}{s^2+3}\]
By inspection of the table, we see that this equals \[f(t) = \cos (\sqrt{3} t) + \sin (\sqrt{3} t)\]
- \[F(s) = \frac{2}{s^2+3s+4}\]
We would like to put the denominator into a form with factors. However, its factors are complex. Using the quadratic equation to identify that its roots are \[ - \frac{3}{2} \pm i \frac{\sqrt{7}}{2},\] we can re-write \(F(s)\) as \[F(s) = \frac{2}{\left( s+\frac{3}{2}\right)^2 + \left( \frac{\sqrt{7}}{2}\right)^2}\] and we can match this expression to one of the terms after applying an appropriate factor. First, note that the above is identical to \[ \frac{4}{\sqrt{7}}\frac{\sqrt{7}/2}{\left( s+\frac{3}{2}\right)^2 + \left( \frac{\sqrt{7}}{2}\right)^2}.\] This looks like entry 10 in the table, so we can pattern-match and say that \[f(t) = \frac{4}{\sqrt{7}} e^{-3t/2} \sin \left( \frac{\sqrt{7}}{2}t\right)\]
- \[F(s) = \frac{1}{(s+4)(s-4)}\]
We note that this is like entry 13 in the table, with \(a=-4\) and \(b=4\). We therefore have \[ f(t) = \frac{1}{4-(-4)} \left( e^{4t} - e^{-4t} \right) \]
2 The Free and Forced Response
2.1 The Free and Forced Response in frequency domain
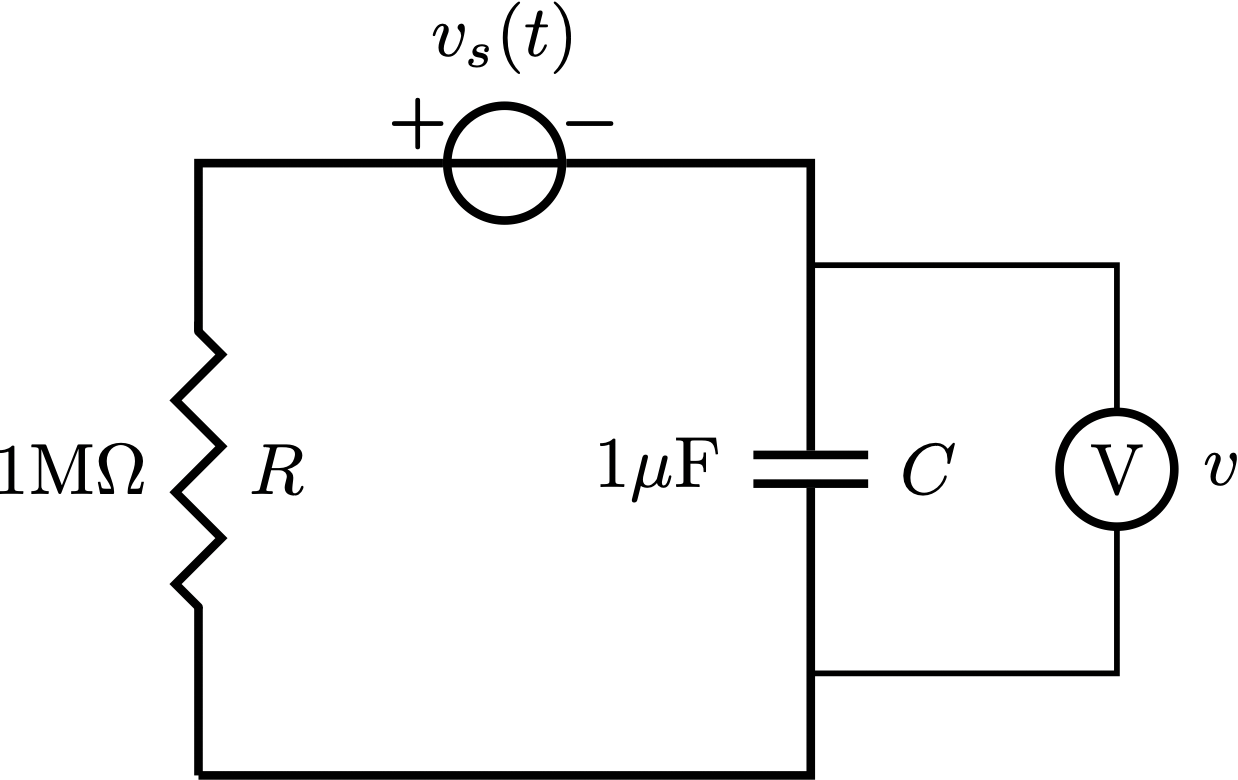
Consider an RC circuit with a variable voltage source. The capacitor initially has \(1.5\) volts across it.
For each of the following cases, write down a mathematical expression for the free response and a mathematical expression for the forced response of the capacitor in the frequency domain.
- \(v_s(t) = 0\) V, a constant equal to zero.
- \(v_s(t) = 5.0\) V, a nonzero constant.
- \(v_s(t) = 2t\) V, a ramp input.
- \(v_s(t) = 5 \cos 2t\) V, a sinusoidally-varying input.
The governing equation for this circuit is \[RC \dot{v}(t) + v(t) = v_s(t).\] Applying the Laplace Transform to this equation, we get \[ \begin{aligned} RCs V(s) - v(0) + V(s) &= V_s(s) \\ RCs V(s) + V(s) &= V_s(s) + v(0) \\ (RCs + 1)V(s) &= V_s(s) + v(0) \\ V(s) &= \frac{V_s(s)}{RC s + 1} + \frac{v(0)}{RC s + 1} \\ V(s) &= \underbrace{\frac{1}{RC s + 1} V_s(s)}_{\text{Forced response}} + \underbrace{\frac{1}{RC s + 1} v(0)}_{\text{Free Response}} \end{aligned} \]
To use the above equation, let’s first use the Laplace Transform on each of the four \(v_s(t)\) functions given above.
- \(v_s(t)= 0 \implies V_s(s) =0\)
- \(v_s(t) =5 \implies V_s(s) = \frac{5}{s}\)
- \(v_s(t) = 2t \implies V_s(s) = \frac{2}{s^2}\)
- \(v_s(t) = 5 \cos 2 t \implies V_s(s) = \frac{5s}{s^2+4}\)
Thus, we are now ready to answer the question by writing out the free and forced response in the \(s\) domain.
When the voltage source is set to \(v_s = 0\): \[ \begin{aligned} V(s) &= \underbrace{\frac{1}{RC s + 1} \overbrace{V_s(s)}^{0}}_{\text{Forced response}} + \underbrace{\frac{1}{RC s + 1} \overbrace{v(0)}^{2}}_{\text{Free Response}} \\ &= \frac{0}{RCs+1} + \frac{2}{RCs + 1} \end{aligned} \] The forced response is \(0\) and the free response is \(\displaystyle \frac{2}{RCs+1}\).
When the voltage source is set to \(v_s = 5\): \[ \begin{aligned} V(s) &= \underbrace{\frac{1}{RC s + 1} \overbrace{V_s(s)}^{5/s}}_{\text{Forced response}} + \underbrace{\frac{1}{RC s + 1} \overbrace{v(0)}^{2}}_{\text{Free Response}} \\ &= \frac{5/s}{RCs+1} + \frac{2}{RCs + 1} \\ &= \frac{5}{s(RC s + 1)} + \frac{2}{RCs+1} \end{aligned} \] The forced response is \(\displaystyle \frac{5}{s(RC s + 1)}\) and the free response is \(\displaystyle \frac{2}{RCs+1}\).
When the voltage source is set to \(v_s = 2t\): \[ \begin{aligned} V(s) &= \underbrace{\frac{1}{RC s + 1} \overbrace{V_s(s)}^{2/s^2}}_{\text{Forced response}} + \underbrace{\frac{1}{RC s + 1} \overbrace{v(0)}^{2}}_{\text{Free Response}} \\ &= \frac{2/s^2}{RCs+1} + \frac{2}{RCs + 1} \\ &= \frac{2}{s^2(RC s + 1)} + \frac{2}{RCs+1} \end{aligned} \] The forced response is \(\displaystyle \frac{2}{s^2(RC s + 1)}\) and the free response is \(\displaystyle \frac{2}{RCs+1}\).
When the voltage source is set to \(v_s = 5 \cos 2t\): \[ \begin{aligned} V(s) &= \underbrace{\frac{1}{RC s + 1} \overbrace{V_s(s)}^{5s/(s^2+4)}}_{\text{Forced response}} + \underbrace{\frac{1}{RC s + 1} \overbrace{v(0)}^{2}}_{\text{Free Response}} \\ &= \frac{5s/(s^2+4)}{RCs+1} + \frac{2}{RCs + 1} \\ &= \frac{5s}{(s^2+4)(RC s + 1)} + \frac{2}{RCs+1} \end{aligned} \] The forced response is \(\displaystyle \frac{5s}{(s^2+4)(RC s + 1)}\) and the free response is \(\displaystyle \frac{2}{RCs+1}\).
2.2 Mathematical Expressions for the free and forced response in frequency and time domains
For this problem, consider a system subjected to a ramp input, \[\dot{x} + a x = f(t) = c t \tag{1}\] where \(x(t)\) is the output we care about, and the input is a simple linear function of time. Let the initial condition be \(x(0) = x_0\)
Using a procedure similar to the one carried out in class for a constant input, determine the free response and forced response in terms of \(a\) and \(c\), in both the frequency domain and in the time domain.
To solve this problem, we write out the differential equation and then take its Laplace Transform.
\[ \begin{aligned} \dot{x} + a x &= c t \\ s X(s) - x(0) + a X(s) &= \frac{c}{s^2} \\ X(s) \cdot (s + a) &= \frac{c}{s^2} + x(0) \\ X(s) &= \frac{c}{s^2 (s + a)} + \frac{x(0)}{(s + a)} \\ \end{aligned} \] At this point, we have already found that the forced response in the frequency domain is \(\displaystyle \frac{c}{s^2 (s + a)}\) and the free response is \(\displaystyle \frac{x(0)}{(s + a)}\). However, the question asks us to do this in the time domain as well, which will require breaking this apart into partial fractions. Let’s write out the forced response as a sum of three terms. \[ \frac{c}{s^2(s+a)} = \frac{P}{s} + \frac{Q}{s^2} + \frac{R}{s+a} \] We can then multiply each fraction by the right term so that we get one big fraction: \[ \frac{c}{s^2(s+a)} = \frac{P s(s+a)}{s^2(s+a)} + \frac{Q(s+a)}{s^2(s+a)} + \frac{R s^2}{s^2(s+a)} \] and then expand the numerator \[ \frac{P s(s+a)}{s^2(s+a)} + \frac{Q(s+a)}{s^2(s+a)} + \frac{R s^2}{s^2(s+a)} = \frac{P s(s+a) + Q(s+a) + Rs^2}{s^2(s+a)} \] Collecting terms in order of decreasing powers of \(s\), we have \[ \frac{P s^2 + R s^2 + a P s + Q s + a Q}{s^2(s+a)} \] and this fraction must be equal to the forced response \(\displaystyle \frac{c}{s^2 (s + a)}\). Equating terms, we can write \[ \begin{aligned} P + R &= 0 \\ aP + Q &= 0 \\ aQ &= c \end{aligned} \] These are three simultaneous equations for three unknowns \(P\), \(Q\), and \(R\). Solving them, we find that \[ \begin{aligned} P &= -\frac{c}{a^2} \\ Q &= \frac{c}{a} \\ R &= \frac{c}{a^2} \end{aligned} \] so the forced response can be written as the sum of three terms: \[ \frac{-c/a^2}{s} + \frac{c/a}{s^2} + \frac{c/a^2}{s+a} \] No similar procedure is needed for the free response, which is already in a nice form. Collecting all the terms, we have \[ \boxed{X(s) = \underbrace{\frac{-c/a^2}{s} + \frac{c/a}{s^2} + \frac{c/a^2}{s+a}}_{\text{Forced}} + \underbrace{\frac{x_0}{s+a}}_{\text{Free}}} \tag{2}\] and by inspection of the Laplace Transforms table, we find that we can write this in terms of time as follows: \[ \boxed{x(t) = \underbrace{-\frac{c}{a^2} u_s(t) + \frac{c}{a} t + \frac{c}{a^2} e^{-at}}_{\text{Forced}} + \underbrace{x_0 e^{-at}}_{\text{Free}}} \tag{3}\]
2.3 Application to a mechanical system.
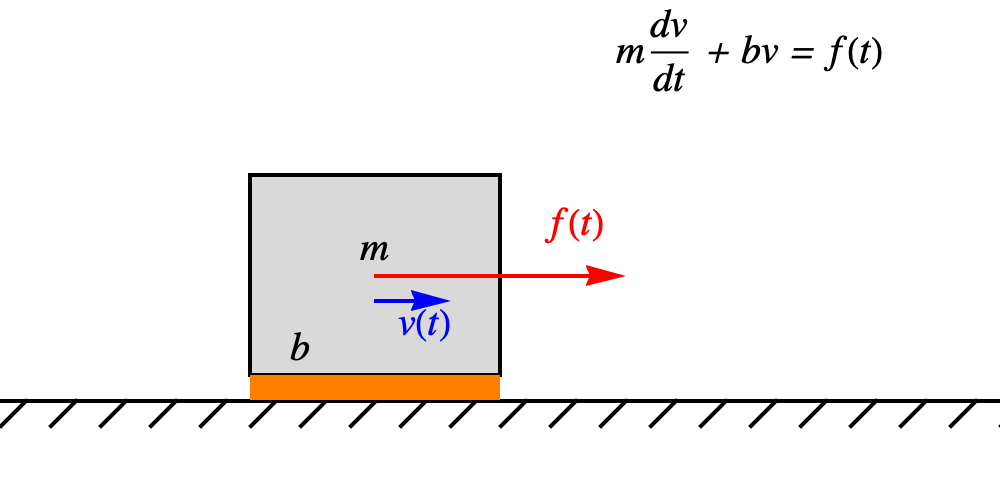
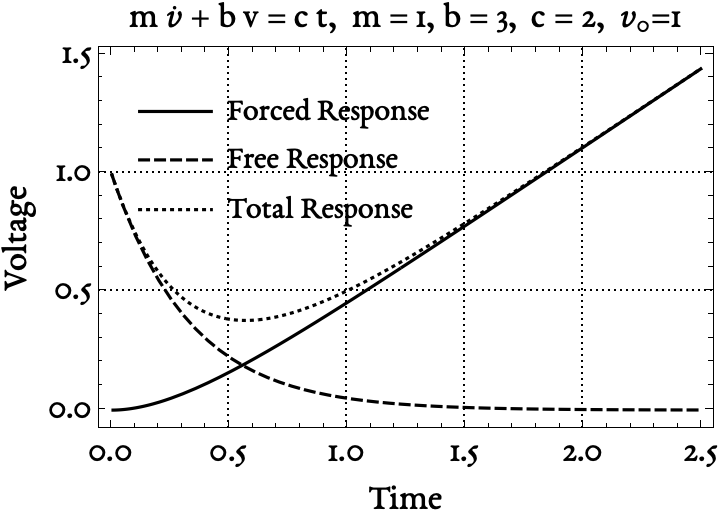
(In some suitable and correct system of units,) consider an object of mass \(m = 1\) with friction coefficient \(b = 3\) subjected to a ramped force \(f(t) = ct\) where \(c=2\). The object was initially moving at a speed of \(1\).
Make a plot similar to the one in lecture showing the free response, forced response, and total response of the object’s speed \(v(t)\) to the applied force \(f(t)\). You will make three line plots, and they should be on the same set of axes. Choose an appropriate range for the horizontal and vertical axes such that the interesting dynamics are illustrated clearly.
To solve this problem, let’s make use of the expression from before, knowing that if \(m=1\), then \(b\), the friction coefficient, equals the ‘\(a\)’ in Equation 1. We are told that \(c=2\). Let’s first re-write Equation 3 from the previous problem, i.e., the forced and free response of a first order system with ramp input is \[x(t) = \underbrace{-\frac{c}{a^2} u_s(t) + \frac{c}{a} t + \frac{c}{a^2} e^{-at}}_{\text{Forced}} + \underbrace{x_0 e^{-at}}_{\text{Free}}\] Now, let’s substitute \(2\) for \(c\), \(3\) for \(a\). We also use \(v(0) = 1\) as given in the question. \[ v(t) = \underbrace{-\frac{2}{3^2} u_s(t) + \frac{2}{3} t + \frac{2}{3^2} e^{-3t}}_{\text{Forced}} + \underbrace{e^{-3t}}_{\text{Free}} \] Plotting these expressions, we get the following result.